
Modular Manipulators: Architecture design, task-based configuration planning and modular library development
Description:
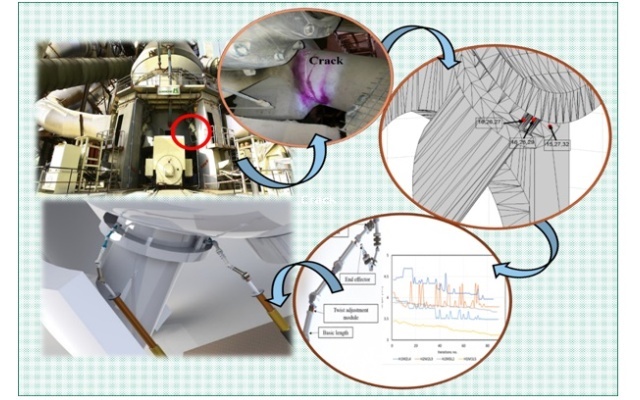
Primary advantage of modularity in serial link manipulators include re-configurability which signifies the possibility of on-site variation of the configuration of a modular manipulator for different task-based requirements. Quick prototype development to represent the realization of task-based designs, which normally result into unusual parameter values, is another advantage of modular architecture. Modular architecture design and assembly planning for unconventional robotic arms are the key features of the robotic group working in the department. Given a work cell and the working locations, the number and type synthesis of modular robotic manipulators are worked upon through formation of constrained optimization techniques. All the robotic parameters are kept variable for a large solution space. Collision avoidance in cluttered environments is handled through utilization of open resources available on collision detection programming modules. Improvement in concept design of the modular components, detailed architectural design, kinematic and dynamic study of the modules – constitute the research directions of the group.
Contact details:
Dr Ekta Singla
Assistant Professor
Links:
